University of Hawaii Drone Technologies 2017-2018
Flight Tests Announcement
Click for more info!
UHDT organizes a flight test every few weeks. If you are interested in our project, you are welcome to attend any of our flight tests. All of them are conducted at Kawainui R/C Air model field.
Next Flight Test Date: Saturday, February 10th.
Time: Time to be determined.
Any flight test is subject to cancellation due to bad weather!
![]()
The Team

Mission Statement
The purpose of VIP UHDT is to create an autonomous Unmanned Aerial System (UAS) that successfully performs all expected obligations of the 2018 Autonomous Unmanned Vehicle Systems International (AUVSI) Seafarer Student Unmanned Aerial System (SUAS) competition to a higher degree than that of last year’s system.
Project Overview
Problem: Hurricanes, storms, tornadoes, forest fires, and explosions are disasters unfortunately common in today’s world. The recent havoc and destruction caused by Hurricanes Harvey and Irma imperiled the lives of tens of thousands of civilians; many were displaced, went missing, or were killed as a result of these disasters. Agencies such as the USCG employ their vast resources in SAR missions to ensure that those whose lives are in jeopardy can be located and removed from harm’s way.
In the event of a natural disaster, land terrain may change to the point of being unrecognizable from the ground. What was once a road to the local supermarket could become as untraversable as the San Andreas Fault. The chances of finding or even reaching targets within these disaster sites with land vehicles is slim to none. These targets include, but are not limited to: trapped humans, animals, and high priority government property. One possible solution to this is aerial access. However, aerial systems manned by humans are very expensive. For example, search and rescue operations conducted in Alaska’s Denali Park and Preserve cost $18,000-$29,000 per operation [1]. In addition, search and rescue missions are often dangerous, putting the SAR team at risk. These problems can be mitigated by using unmanned aerial systems.
The UHDT team is working to provide a solution to these problems by developing a UAS that will compete in the AUVSI SUAS competition to encourage the research and development of drones capable of SAR operations. Since the AUVSI SUAS competition simulates SAR operations, the UHDT UAS will be developed comply with the rules and complete the tasks of the competition.
There are several areas which can be improved upon for this year’s competition. Currently, the problems carried over from last year include: poor organization of internal components, lack of autonomous landing capabilities, lack of in-flight image transfer, and an inefficient image processing method. Furthermore, there are some obstacles that UASs cannot overcome that are less problematic for traditional manned SAR operations. The UHDT team does not intend to design a system to completely replace conventional SAR methods, but to supplement them by minimizing the time and money required to locate the targets of interest. This will facilitate the deployment of the proper SAR method to rescue the target. These are the technical issues that the UHDT team will be resolving this year.
Goal: The purpose of VIP UHDT is to create an autonomous UAS that successfully performs all expected obligations of the 2018 AUVSI Seafarer SUAS competition to a higher degree than that of last year’s system.
References:
[1] – Staff, WKRG. “Coast Guard Completes Search and Rescue Operations in Response to Harvey.” WKRG, 7 Sept. 2017, wkrg.com/2017/09/07/coast-guard-completes-search-and-rescue-operations-in-response-to-harvey/. Accessed 17 Sept. 2017.
Team Overview
Program Manager: Kalani Danas Rivera
Chief Engineer: David Harris
Team Captain: Grace Hayashi
Financial Officer: Austin Morishita
Mission Operations: Eliesse Hihara, Casey Jones
Aircraft Systems Lead: Kenji Rutter
Electronics Systems Lead: Reyn Mukai
Image Processing Systems Lead: Aaron Villanueva
Aircraft Subsystem: Sung Wan Park, Nicholas Yamamoto, Igor Melnichenko, Kristen-Ann Wong,
Keola Wong, Kody Wakumoto, Peyton Young
Electronics Subsystem: Kurt Tanaka, Justin Pagtolingan, Alicia Leong
Images Processing Subsystem: Jaymark Ganibi, Austin Haigh, Matthan Mejia
Schedule and Performance Overview
Last Updated: 02/05/2018
As of right now we have used up all 4 weeks of buffer time, further delays would result in us being behind schedule.

Our next major milestones are to assemble new air-frame, assemble Power Distribution Board (PDB), and to integrate image processing system.
Current Tasks UHDT Drone can Perform:
1)Pilot controlled take-off by hand launch, landing and flight
2)Pilot controlled take-off from a trolley with less than 50% success rate.
3)Autonomous flight
4)Image capturing and target recognition
5)Air Delivery
Tasks to be accomplished:
1)Autonomous take-off from a trolley with 100% success rate
2)Autonomous landing using carbon fiber landing shell
3)Stationary obstacle avoidance
4)Better target recognition
5)Slower stall speed
6)Accurate 8oz water bottle delivery with water being spilled on impact
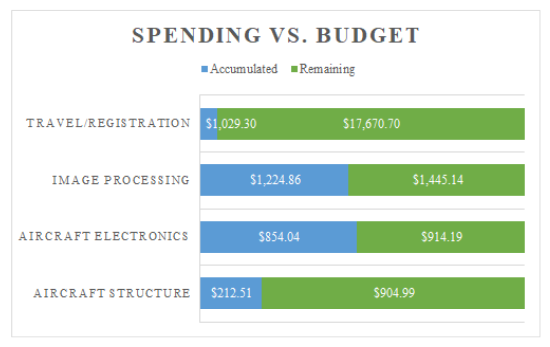
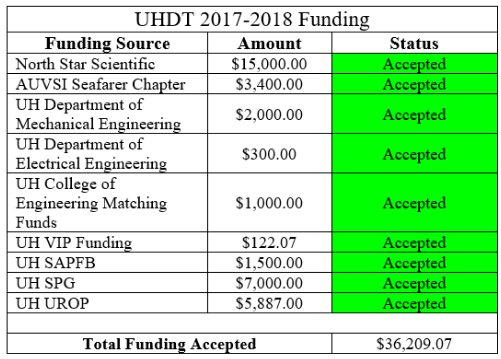
Finances Overview
Last Updated: 02/05/2018
Contact information:
Project Manager: Kalani Danas Rivera
E-mail: kalanidr@hawaii.edu